
一提到探索太阳系,火箭往往是这类新闻标题中最突出的部分。然而太空探索最重要的一个方面却更加接地气:表土,月球、火星、小行星、彗星甚至地球上可以找到的泥土和岩石的分解混合物。无机混合物可能含有宝贵的矿物质,而副产物可以用于支持月球据点和地球。难点在于找出在低重量或零重力环境下开采大量原料的方法。
阅读本案例研究了解:
- 紧凑的标准产品 (COTS) -高功率密度伺服驱动器如何实现在低重力的崎岖环境中帮助机器人进行导航
- 在一个可进行PCB 安装的小型封装内提供顶级的伺服性能、先进的网络总线 技术和高可靠性
- 缩短开发时间,加快上市速度

图 1:RASSOR 利用对向旋转滚筒打造零作用力挖掘机,用于从月球、火星和小行星表面采集材料。(NASA 供图)
机器要求
NASA 开发用于在低重力或零重力环境开采并运输表土的遥控移动机器人-风化层高级表面系统操作机器人 (RASSOR)。RASSOR是一个概念设计,利用主要耐用的现成的标准 (COTS) 组件打造,减少尺寸、重量和功耗。Bionetics(NASA 承包商)机器人工程师 Andrew J. Nick 表示: “我们努力找到满足我们严格的重量和空间制约,能够在封装内读取多个传感器,同时无需我们大量研发的商业化产品。我们只需使用产品,将重点放在研究上。”
RASSOR 基于安装在移动机器人平台上的一对对向旋转滚筒。每个滚筒由一个伺服轴独立驱动,安装在独立控制的机器臂上,单个旋转轴安装在有轮移动机器人平台上。滚筒旋转与机器臂定位相结合,支持 RASSOR 执行先进定位和避开障碍物等特技。
平衡对向旋转滚筒的力,需要高精度反馈和复杂挖掘算法。复杂运动需要接头切换工作模式,例如速度和位置,以及接收反馈以允许接头协调工作。
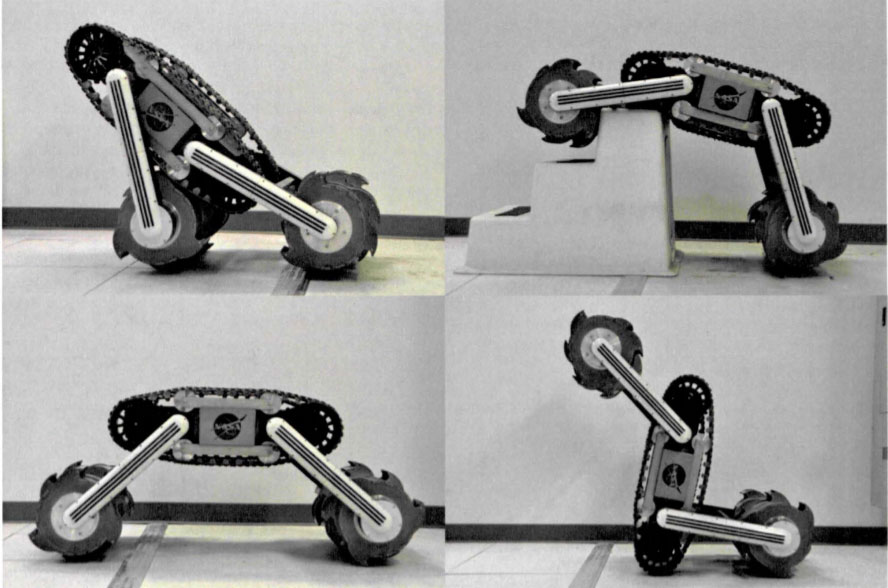
图 2:旋转臂和滚筒组合支持早期版本的 RASSOR(从左上顺时针)翻滚,攀爬障碍物,假定 Z 位置将滚筒排空到超大料斗中,提升车轮离开地面以避开地表陷阱或去除残渣。(NASA 供图)
运动控制解决方案
- Gold Solo Whistle 驱动器

挖掘机包括总共 10 个运动轴:每个滚筒两个电机,每个臂两个电机,一对电机驱动底盘车轮。负载采用绝对式光学编码器,电机轴采用增量式光学编码器。
考虑到复杂程度和需要的反馈量,NASA 需要驱动器层级的智能。“RASSOR 不仅仅是‘有各种回路的驱动器’的笨拙机器人”,Nick 表示。 “我们需要的不仅仅是开关电机的基本驱动器。我们需要具有反馈和控制的智能电机。”
团队选择 Elmo Motion Control 的 Gold Solo Whistle 驱动器满足其需求。 E每个驱动器可以在电流模式、速度模式和位置模式下工作。PC 控制器通过 CANopen 发送基本运动要求。驱动器自行控制换向、电流调节、速度调节和位置回路。驱动器的内部轨迹发生器使用目标端点以及加速/减速及速度信息规划路径,定位负载。
驱动器提供极高功率密度,非常适合空间有限的 RASSOR。它们还适合工业应用,耐用性足以胜任应用的高冲击和振动。敷形镀膜还有助于防范可能进入壳体的粉尘。团队使用 Elmo 的驱动器调节与配置软件 Elmo Application Studio进行调节。
最新的解决方案:
自从设计这款机器人后,Elmo 推出了新的解决方案。现在:
- 可以借助 Elmo 的 Platinum Maestro (PMAS) 运动控制器,通过中央 PLC 或计算机通过无线网络控制和操作系统。
- 应用程序可以使用 Gold Solo Twitter 伺服驱动器。
- Elmo 独有的“R”型伺服驱动器可以提供更大的持续电流 – 非常适合需要长时间大电流以越过障碍物的高惯量运动系统(如 AGV)。
Gold Twitter
大电流的NANO伺服驱动器
80A/80VDC, 1-50A/ 100VDC ,3-15A/200VDC