
CANopen网络中的 Cello伺服驱动器协助运动控制
Elmo Motion Control 简化由 3D 激光扫描仪和喷水机器人组成,用于肉品切割应用的精密设备。Elmo的解决方案在 CANopen 网络中使用 Cello 伺服驱动器,协助最多 8个不同轴的运动控制。
挑战
在牛肉、禽肉和鱼肉加工应用中,有一系列复杂任务,分析每块肉,然后切割为差不多大小或重量的净肉。Elrad Ltd. 实施使用 CompuScan 300 机器人喷水系统的解决方案,利用 3D 激光扫描仪、强大的计算机分析程序和 X-Y 机器人喷水切割机切割肉品。系统加工鱼肉、牛肉、猪肉和火鸡肉,切割骨头、脂肪和组织。根据每个具体应用定制的实际机器加工移动传送带上的肉品。
每件肉品首先由 CCD 摄像头拍照,然后进行分析以确定肉品形状和表面特征,包括定位脂肪纹路和血块。中央处理装置根据这些信息插值形状和运动,将肉品切割为类似大小或重量的块。传送带上方组装的直线滑块上安装的水枪按照加工信息执行实际切割。
为了操作系统的多个轴,中央系统最初使用多轴控制器,将模拟电流命令发送到轴上的电流模式放大器。此方案虽然可行,但需要大量电线和连接器,用于多个编码器、电流命令、启用/禁用命令和各种 I/O 命令,带来极高的成本。扩大到 8 个端口和提高通信速度的需求阻碍了使用 RS-232 通信简化此配置的尝试,而且无法支持先进运动要求。
需要解决方案管理采用快速通信的 6到8个不同轴,同时减少布线数量和复杂程度,为接下来的客户应用设计提供灵活性。
Elrad 肉片加工生产线配置了 Elmo Cello 伺服驱动器
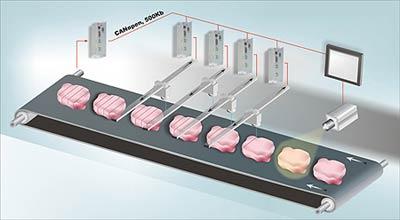
Elrad meat processing line configured with Elmo Cello servo drives
Elmo 的解决方案
Elmo公司的Cello 数字伺服驱动器用于控制传送带上方安装的每个喷水切割头部的来回动作。另一个 Cello 控制输送肉片的传送带电机动作。执行 3D 可视化的光学头部连接 PC,由后者执行视觉分析,确定运动轨迹,管理人机界面。为了简化和改进与传送带轴和机器人的通信,Elmo Motion Control 协助 Elrad 系统设计师为分布式联网实施 CANopen 访问层,安装在同一控制分析 PC 上。实施 Elmo Interlude API 以及经现场认可的 CANopen 通信库,将整个操作时间缩短为一周。


快速灵活
使用 Elmo 创新的多轴解决方案以及 Elmo Cello 数字伺服驱动器,简化了 Elrad 食品加工系统,提高速度和灵活性,并节约成本。CANopen 总线解决了通信速度问题,同时极大适应新配置,包括增加轴和不同 I/O 要求。在多个轴之间插值运动,单个轴的控制直接而高效。
将笨重的多轴控制器替换为 CANopen 总线可以消除复杂接线,节约硬件和整个搭建过程的成本。配置 Elmo Cello 伺服驱动器和集成 CANopen 的 Elrad Compuscan 已经证明是极为成功的解决方案。