
精准的成像技术推进了如今先进的医学治疗手段。例如,由医师操控的C型臂能在手术,整形外科,整形外科,重症监护和急诊治疗过程中更安全精准地透视成像。但是,这需要在处理设备大量的复杂操作时,保证持续传递一个高分辨率影像的数据流。Elmo先进的运动控制解决方案使之成为可能。
阅读此案例可以了解
- Elmo多轴网络控制器能进行复杂实时的计算,释放计算机程序的资源。
- 先进的运动算法如何确保C型臂的精确移动。
- 小型的伺服驱动器使设计紧凑小巧,轻盈的设备成为可能。
- 通过TUV认证的内置安全功能以STO(安全关断)的形式实现。

背景
C 形臂是先进的医疗技术中极为重要的工具,用于手术、整形外科、重症护理和急诊应用的透视成像。精确控制、即时响应和患者安全是现代先进C形臂X光机使用过程的关键。
医生通过控制台/脚踏开关控制所有工作模式和移动,实时操作 C 形臂。C形臂通过医生的直接控制,围绕患者移动,它采用平衡和同中心设计,为轨道旋转提供几乎不受限制的投影。C型臂在成像源(如 X 射线)与待成像身体部位之间保持恒定距离。中心竖线始终保持在同中心,节约过程时间,减少患者承受的辐射剂量。
机器要求
C型臂的移动由一个计算机程序控制,能够收到医生的从控制台发出的指令。其他的程序获取,处理和呈现高分辨率的影像给医生观看,帮助医生在手术时完成更好的操作。该公司需要一个解决方案,能够达到高质量,并在处理C型臂大量的复杂操作时持续传递一个高分辨率影像的数据流。s.
运动控制解决方案:
- Gold Maestro 多轴网络控制器
- Gold Twitter 伺服驱动器
该公司选择Gold Maestro多轴网络控制器来应对这些挑战。当所有的到达C型臂的运动控制指令仍然通过计算机应用程序源源不断地输入,Gold Maestro网络控制器和Elmo的闭环解决方案完美地协调了大量复杂实时的计算,释放计算机的资源,把这些资源集中在快速的影像获取,处理和呈现上。
Gold Maestro是先进的多轴运动控制器,并能和Elmo所有大功率伺服驱动器配合。分布式拓扑带来整个运动控制系统包括节点的智能模块化设计,每个节点包含一个带有EtherCAT标识的伺服驱动器,控制器能紧密地监测和控制伺服驱动器,确保轻松无缝集成适合每个轴的伺服驱动器,并提供极为精确和灵敏的运动控制。在 Gold Maestro的控制下,伺服驱动器精确监控 C 形臂的每个运动,极大提高整体运动系统效率,同时保持紧凑设计。
另外,Gold Twitte驱动器安装在C型臂的每个轴上。驱动器只有火柴盒大小,重量仅为18到22克,减轻了移动部件的整体重量,增加了系统的灵活性。所有驱动器。所有驱动器都由EtherCAT网络链接接入Gold Maetro控制器,系统的循环时间在500µ秒内。Elmo小巧而强大的伺服驱动器搭载合适的算法,满足了C型臂对速度,精度,准确度和性能的所有要求。
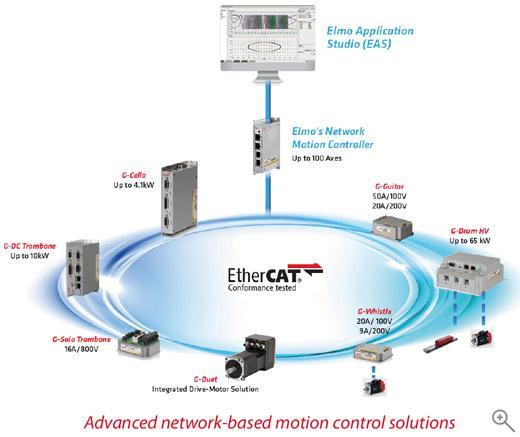
先进的网络运动控制解决方案

Gold Maestro
基于先进的总线网络的多轴运动控制
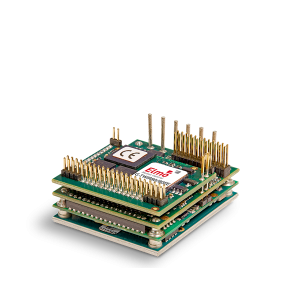
Gold Twitter
大电流的NANO伺服驱动器
80A/80VDC, 1-50A/ 100VDC ,3-15A/200VDC
结果
Elmo的C型臂解决方案源于丰富的行业经验和标准合规性带来的优势。Elmo的驱动器驱动了为C型臂的运动,确保在任何电压下的高精度,能在治疗过程中实现优秀操作和较小剂量伤害。当Gold Maestro协调运动控制网络时,计算机的应用程序聚焦在成像,每个Elmo的伺服驱动器控制对应的轴,并保持高分辨率。另外,这一解决方案拥有超乎寻常的平均故障时间(MTBF),实施和操作简单,易于升级更新。
点击下载 PDF 文件