Support for all essential kinematic transformation types
Used In:
- Robotic applications
- Applications using mechanics represented by clearly-defined mathematics
Used In:
Kinematic transformations are an essential feature of motion control systems today.
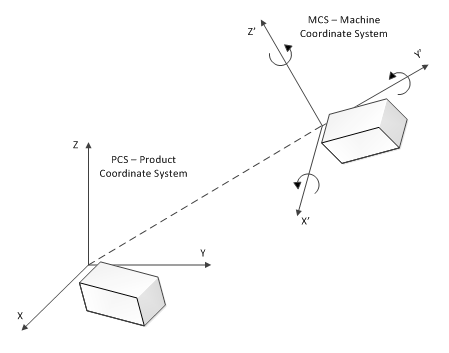
The G-MAS enables application engineers to work within a Tool-Center-Point (TCP) system framework, without the need to perform exact displacement calculations for each axis to reach the desired position. Using G-MAS, once the engineer has defined the mechanical system with application-specific parameters, only the End Effector (EE) would need to be addressed during actual work.
Kinematic transformations are used wherever the mechanical system can be represented by a clearly defined set of mathematical instructions, for example these different robot types:

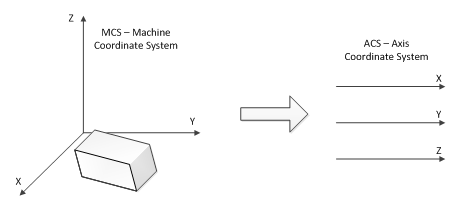
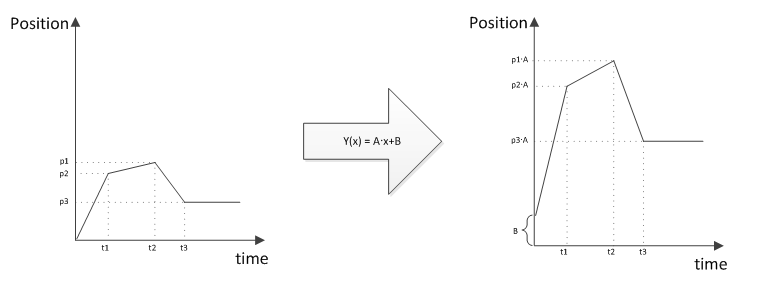
Three kinematic transformations types are supported:

Thank you for your interest. Please fill in the form and we will get back to you shortly
Thank you for your interest. Please fill in the form and get access to the requested material