Fine control over drive motion using real-time velocity and position data
Used In:
- Point-to-Point motions
- When highest accuracy is needed for settling time
Used In:
Gain scheduling enables fine-tuned control over servo motion velocity and position. It provides the user with the capability to change the drive’s gains on-the-fly according to its motion in real time.
Elmo’s 3-step gain scheduling provides dedicated, configurable parameters for servo motion in different stages:
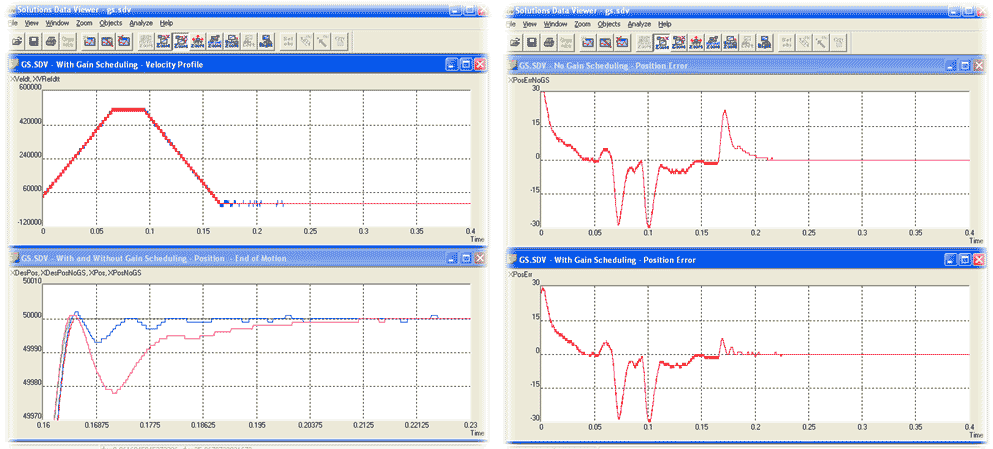
The following graphs show how an example of how gain scheduling can improve settling performance at the end of a motion. On the left is the velocity profile with a detailed before-and-after zoom of gain scheduling effects. On the right is a before-and-after position error plot of gain scheduling effects.
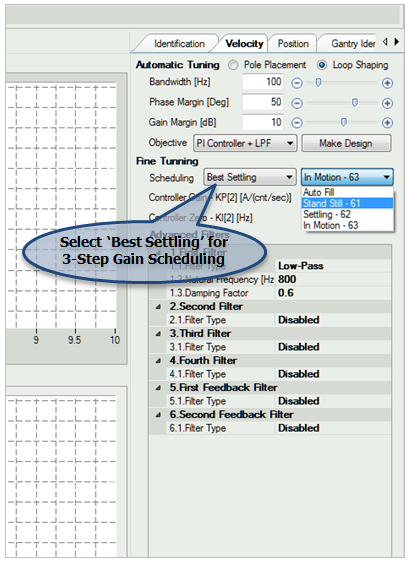
Gain scheduling is easily configured using the Elmo Application Studio (EAS):
For more information please contact our motion control experts.
For more information please contact our motion control experts.
Thank you for your interest. Please fill in the form and we will get back to you shortly
Thank you for your interest. Please fill in the form and get access to the requested material